
Initial Sea Trials for Autonomous Tug Project
ST Engineering has successfully completed initial sea trials in Singapore waters for the first of its kind Smart Maritime Autonomous Vessel (SMAV) project in April 2020.
With artificial intelligence algorithms at work, getting a vessel to fully operate without a crew is now a dream come true for the next phase of transformation in the maritime industry.
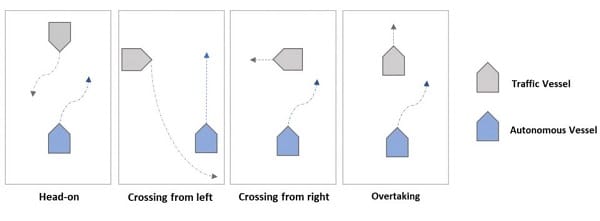
Similar to other autonomous applications, the ultimate objective of going autonomous is to enhance continuous safety and work efficiency. This is all the more so for the autonomous tug project, which requires the collision avoidance algorithm to work in accordance with COLREGS rules, particularly in the safe overtaking, head-on and crossing of vessels. The sea trials were conducted in various scenarios and varying speeds up to 8.5 knots while the vessel is in autonomous waypoint navigation mode.

Actual sea trials on navigation autonomy with head-on collision avoidance algorithm.
“As the maritime industry moves towards leveraging technology to develop autonomous vessels and enhance operations in a safer, faster and more cost-effective manner, autonomous ship technology can be implemented to many other vessel types. ST Engineering is ready to provide ship owners with such solutions to meet the future of shipping,” said Ng Tee Guan, Vice President (Marine Technologies & Solutions)
POSH Harvest–a harbor tug owned and operated by PACC Offshore Services Holdings (POSH)–was converted into an autonomous vessel incorporating with key features as follows:
• Autonomous waypoint navigation with Collision Detection and Collision Avoidance (CDCA)
• Remote centralized control and health monitoring of the shipboard systems with NERVA Ship Management System
• Forward looking maintenance capabilities such as condition-based maintenance, predictive diagnostics and prognostics on critical shipboard systems with the NERVA Sensemaking System
Multiple testing and simulation
Before the sea trials, multiple testing and simulation were performed in the lab. These simulated scenarios were reiterated with varying parameters. The same goes for the autonomous kit where stringent tuning trials were simulated to match the vessel characteristics.
COLREGS-inside: Navigation system with collision avoidance algorithm.
The development work on the SMAV will continue through 2020.
The products and services herein described in this press release are not endorsed by The Maritime Executive.
