
Autonomous Drone Subs Help Researchers Study Arctic Plankton
Underwater robots, combined with simple instruments from 100 years ago, are helping researchers unlock the secrets of microscopic marine organisms.

[By Ingebjørg Hestvik]
Kongsfjorden, Svalbard, May 2022: It’s spring, the sun is shining – which means the plankton in the cold waters of the Arctic Ocean are about to bloom.
Long bright days and rising temperatures have awakened the phytoplankton. The spring bloom has begun, and populations of these tiny plankton are growing explosively beneath the surface.
From a boat out on the fjord, Tore Mo-Bjørkelund launches a robot into the sea. Then another one.
The robots are two lightweight autonomous underwater vehicles (AUVs) that have been programmed to move around in the water and detect the fluorescence emitted by chlorophyll. Chlorophyll is the green pigment that phytoplankton uses for photosynthesis.
“Spring is a hectic time in the ocean, and algal blooms are a dynamic and complex process. They are difficult to analyse in detail,” says Mo-Bjørkelund.
Water sampling
Mo-Bjørkelund’s PhD at NTNU has involved developing algorithms to map the bloom in both time and space. Accompanying him out on the sea is marine biologist Sanna Majaneva, who is ready to take water samples once the robots have located the densest concentrations of algae.
While Mo-Bjørkelund is testing expensive new advanced robotics, Majaneva is equipped with a Niskin water sampler: a plastic tube attached to a wire with a simple mechanical trigger mechanism.
When the tube reaches the right depth, a weight is sent down the wire that hits a trigger and the tube closes. The sampler is very similar to one Fridtjof Nansen developed over a hundred years ago to collect water samples at precisely the desired depth.
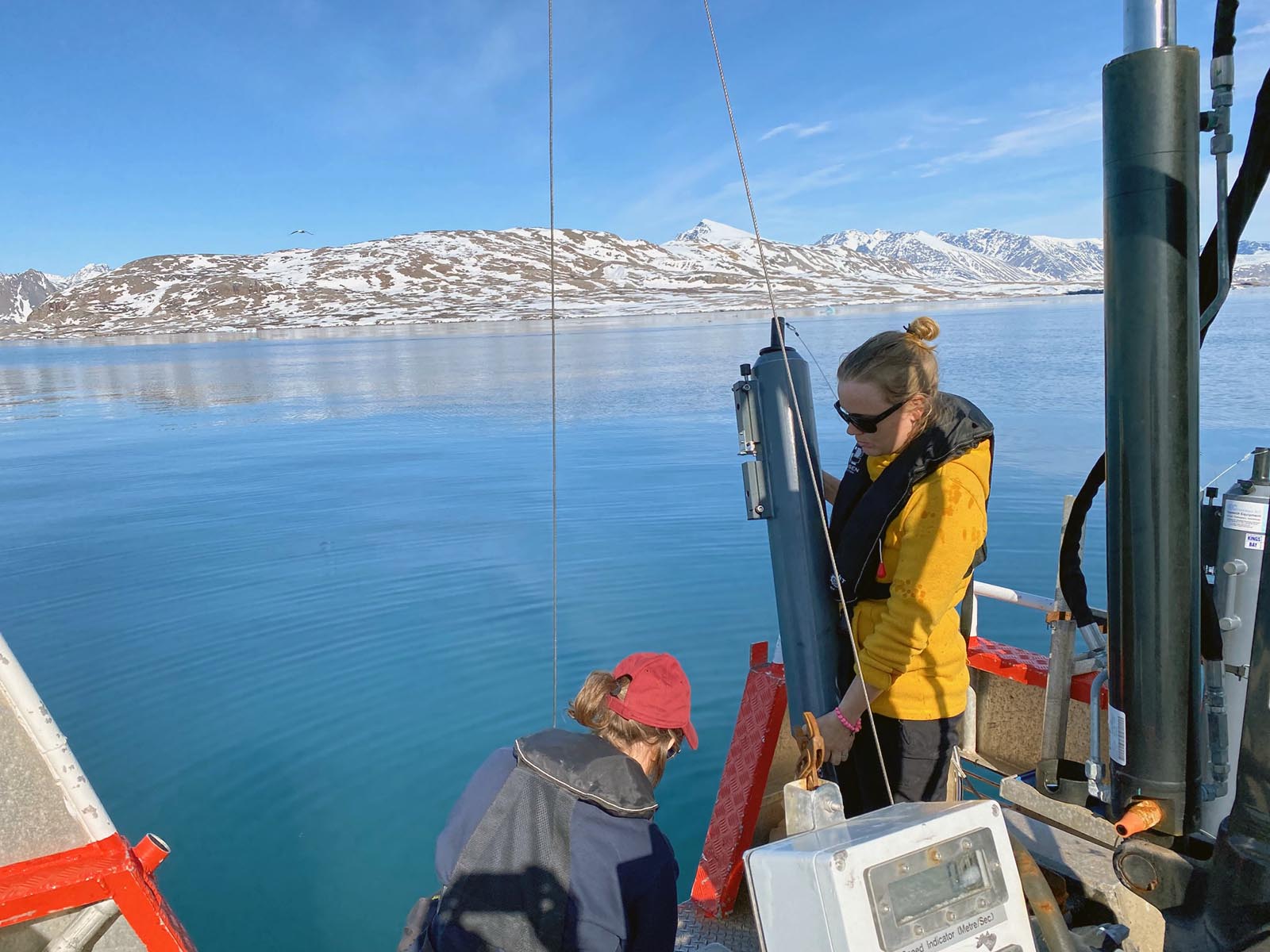
There are a number of different ways to study plankton. Here, the researchers use a Niskin water sampler. Photo: Martin Ludvigsen, NTNU
Old but reliable methods
The two AUVs moving around below the surface may seem technologically superior, but it is Sanna Majaneva’s simple water sampler that ultimately provides all the answers.
“Those things really work. The problem with technological development is that the things we make don’t usually work. By contrast, a plankton net or a water sampler works almost every time. They are simple, cheap and reliable solutions that modern technology struggles to match,” says Mo-Bjørkelund.
However, biologists need new solutions to gain a better overview of what is happening beneath the greyish-blue, opaque surface of the water.
A water sampler can take samples along a vertical line in the water and provide an overview of what is happening at precisely that location. But it provides little insight into what the algal bloom is doing in the space surrounding that vertical line.
That’s why Majaneva needs help from Mo-Bjørklund’s underwater robot. The robot can do something that her water sampler can’t: It can find its way to the tightest concentration of phytoplankton in the water column.
Can check plankton concentrations and dispersal
“You might think plankton is distributed homogeneously in the water, but we know that in fact the distribution is quite uneven – a kind of a fine-scale patchiness,” she said. “It’s difficult to study using traditional methods, and there may be more interaction between the different organisms inside these patches than we currently know about.”
Majaneva is one of several marine biologists from NTNU who have participated in the ‘Nansen Legacy’ project, an interdisciplinary research project on the marine climate and ecosystems undergoing rapid changes.
The annual spring blooms of phytoplankton form the very foundation of marine ecosystems, yet there is still much we do not know.
“I study zooplankton. I want to understand what differentiates them from each other, how they coexist, and how they influence one another in the pelagic environment,” says Majaneva.
Studies of what happens during a phytoplankton bloom are important to gain better insight into the processes affecting organisms one step higher up the food chain.
“We would like to know more about biodiversity and the prevalence of different plankton species. Perhaps this fine-scale patchiness plays a more significant role than we previously thought,” says Majaneva.
Robots taught to make decisions underway
The two underwater robots are now going to move around and measure fluorescence in an area measuring 1.5 by 1.5 km, down to a depth of 50 metres. This will allow them to locate the highest concentration of chlorophyll in this three-dimensional box of water.
They will also calculate where the measurements are most uncertain so they can retake measurements and improve the quality of the data. At the same time, they need to avoid crashing into each other.
“The topic for my PhD has been adaptive measurements. Measurements are used along the way to determine where to measure next. I wouldn’t call it artificial intelligence as there are no neural networks in play, but we train a model on data we collect in the field. The robot makes decisions based on data collected during the process. The model is a mathematical-statistical process, a spatially optimal that the robot uses to make decisions,” Mo-Bjørkelund says.
Prior to his fieldwork, he has fine-tuned the software by running simulations of what the researchers expect to happen in the field. He will now find out if the system works.
3-D pictures of photosynthesis in real time
After an initial round of mapping, the two robots rise to the surface to exchange data via satellite. This enables one robot to make decisions based on data from the other. This may include revisiting areas with uncertain measurements as well as avoiding colliding with the other robot.
On board the research ship, the researchers can monitor the measurement data, which are displayed as three-dimensional images on a screen, creating a model of the photosynthesis in the water, right there and then.
“In this case, we saw that there wasn’t much chlorophyll on the surface, but that there was a huge bloom further down,” says Mo-Bjørkelund.
While Mo-Bjørklund has done most of his work in the office before the expedition to Svalbard, this is where Majaneva’s work begins.
The water sampler’s turn
After a second round of measurements, the robots are lifted out of the water. The researchers sail to the location where the robots measured the densest concentrations of chlorophyll and deploy the water sampler to find plankton.
What species are in the water? How does energy flow between the phytoplankton and the zooplankton?
For Mo-Bjørkelund, this marks the culmination of years of work.
“This was just a trial. If these types of robots are to be used as a standard method, much more engineering is required. Biologists are using technology that was developed decades ago, because modern technology simply isn’t reliable enough yet.”
Developing cost-effective research
Trondheim, 2024: Two years have passed since the expedition to Svalbard. Mo-Bjørkelund has long since completed his studies at NTNU and has established his own underwater technology company with three other former NTNU students.
Norwegian SciTech News meets up with Sanna Majaneva over a quick coffee between busy sessions at NTNU University Museum’s laboratory in Trondheim.
She has used methods from genetics to find out which plants and animals were in the water samples from Kongsfjorden. However, identifying which organisms are present in the water is not straightforward, even if their DNA is found in the water samples.
“We use environmental DNA and genetic barcoding to identify phytoplankton, zooplankton and fish. Environmental DNA is an effective method for mapping biodiversity, but there are still many species that are not found in the DNA reference libraries,” says Majaneva.
Moreover, even if researchers find DNA from a particular species in a specific area, they cannot be certain that the organism lived precisely where they found it.
“It may also have been a fragment that floated down from further up in the water column,” Majaneva explains.
Constant pressure
She talks about the constant pressure to make environmental monitoring and biological research as cost-effective as possible.
The genetic methods save her from months of microscope work, but they still require development and leave many questions unanswered.
Mo-Bjørkelund’s underwater robots may also save biologists valuable time in the field.
“These type of robots will enable us to investigate several locations, at different depths, and study the effects of different currents. They will help us decide where the samples should be taken, or where we should locate the stations. Should we take water samples at a depth of 20 or 35 metres? After all, we can’t bring the entire water column on board. Maybe the robot can take water samples for us? Then we wouldn’t even need to be present. Expeditions are expensive,” says Majaneva.
The way forward
The Nansen Legacy project has now been completed, but work on developing autonomous underwater robots at NTNU continues.
“The ocean is constantly changing and we will never be able to measure everything all the time. In order to gain the best possible understanding of the ocean, we need to concentrate our efforts in the most interesting areas,” says Professor Martin Ludvigsen at the Department of Marine Technology.
The Harvest project is now testing how underwater vehicles can use sonar technology and particle cameras to calculate the concentration of zooplankton in the water column, while the Mascot project concentrates on the statistical methods that enable the robots to determine where and when measurements should be taken.
“Adaptive mapping using AUVs can give us much better insight into the dynamics of physical, biological and chemical processes in the ocean,” Ludvigsen says.
Majaneva believes that the Nansen Legacy project has demonstrated the importance of interdisciplinary collaboration.
“We need each other’s knowledge to see the big picture,” she said.
This article appears courtesy of Gemini.no and may be found in its original form here.
Reference: Mo-Bjørkelund, Sanna Majaneva, Glaucia Moreira Fragoso, Geir Johnsen, Martin Ludvigsen: Multi-vehicle adaptive 3D mapping for targeted ocean sampling | PLOS ONE
The opinions expressed herein are the author's and not necessarily those of The Maritime Executive.