Navy Tests Fishlike Near-Shore AUV
Researchers at the U.S. Naval Research Laboratory (NRL) have taken inspiration from nature, from fish, in particular, to design and develop novel underwater propulsion, control, and sensing solutions for near-shore and littoral zone missions.
Autonomous underwater vehicles (AUVs) have demonstrated many successful capabilities in inspection, surveillance, exploration, and object detection in deep seas, at high speeds, and over long distances. However, operations in littoral zones requiring low-speed and high-maneuverability present mobility and sensing challenges that have not been satisfactorily resolved.
"Expeditions in near-shore environments are complex, often proving turbid, cluttered with obstacles, and plagued with dynamically changing currents," said Jason Geder, aerospace engineer, Laboratories for Computational Physics and Fluid Dynamics at NRL. "Inspired by the pectoral fins of the reef fish, bird wrasse, NRL researchers have developed an actively controlled curvature robotic fin that provides scaled down AUVs a novel low-speed propulsion system."
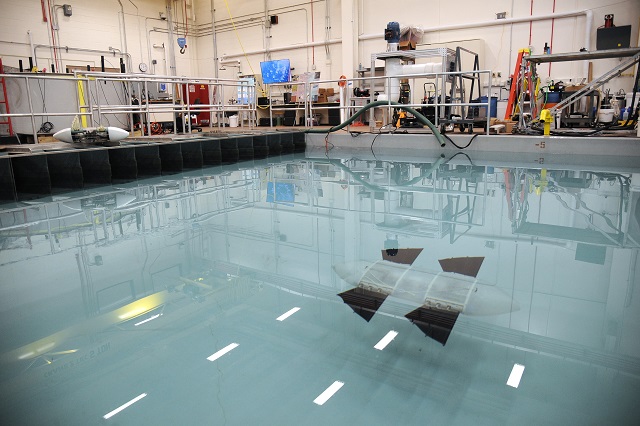
The artificial pectoral fin has been integrated into a man-portable, unmanned vehicle named the Wrasse-inspired Agile Near-shore Deformable-fin Automaton, or WANDA. Four side-mounted fins, two forward and two aft, provide all the propulsion and control necessary for the vehicle. A set of custom control algorithms uses information about the vehicle motion and surrounding environment to inform changes to the fin stroke kinematics, or fin gaits. This kind of artificial fin technology can adapt to varying flow conditions and provide the thrust control necessary for low-speed maneuvering and precise positioning.
"Computational and in-water experimental results have demonstrated WANDA's capabilities," Geder says. "WANDA can perform low-speed maneuvers to include forward and vertical translation and turn-in-place rotation, and we are currently evaluating station keeping in the presence of waves."
WANDA is designed to operate at speeds in excess of two knots, or hold position in the presence of two-knot currents, giving it the propulsion and control authority needed in many harbor and other near-shore operational zones. WANDA can also successfully coordinate maneuvers to achieve waypoint navigation.
As WANDA's fish-inspired technologies are perfected, the AUV is being prepared for payload testing. The vehicle's modular construction enables easy integration of different mission-specific payload packages, and one such payload that will be developed and tested on WANDA starting this year is a biochemical sensing system for trace level detection of chemical signatures. This sensor system built onto a capable low-speed platform such as WANDA will enable missions in plume tracking and target localization in shallow water environments.
The WANDA program has spawned other related programs to enable Navy critical missions using AUVs. NRL's Flimmer (Flying Swimmer) program seeks to develop an unmanned platform that will be deployed from the air, glide to a water surface landing in an area of interest, and transition into a swimming AUV.

that matters most
Get the latest maritime news delivered to your inbox daily.
As the Navy's focus on autonomy and unmanned systems intensifies, NRL's bio-inspired research into capable propulsion and control technologies for low-speed operation in near-shore environments is helping to close a clear gap in AUV technology. An unmanned vehicle that can effectively operate in these areas, where traditional platforms experience stability and control problems, will improve performance for critical missions including harbor monitoring and protection, hull inspection, covert very shallow water operations, and riverine operations.